중량물 이송, 포장 전후, 팔레트 간 이동, 반복 투입·취출, 검사·적재 공정을 검토합니다.
PROCESS-CENTERED MATERIAL TRANSFER
제조공정의 이송 문제를 분석해
현장에 맞는 자동화 구조를 설계합니다.
로보틱박스(ROBOTICBOX)는 제조공정의 중량물 이송 문제를 분석하고, 작업자 보조형 이송 장치, 전동밸런서, Jig(Gripper), Rail / KBK, Robot · AI Vision을 공정 조건에 맞게 조합합니다.
특정 장비 판매가 아니라,
실제 현장에 적용 가능한 이송 구조를 제안합니다.
- 제조공정 이송 문제 진단 무엇을, 어디서부터 어디까지 옮길지 먼저 정리합니다.
- 대상물별 Jig(Gripper) 설계 Magnetic / Clamp / Vacuum / Custom 방식 중 적합한 구조를 검토합니다.
- 단계적 자동화 구조 제안 작업자 보조형 이송부터 Robot · AI Vision 연계까지 확장합니다.
Jig(Gripper), 작업자 보조 장치, Rail / KBK, Robot, AI Vision을 공정 조건에 맞게 조합합니다.
※ Moon Lifter는 작업자 보조형 이송 장치의 주요 옵션입니다.
공정 진단 → 구조 선택 → 옵션 설계 → 설치·운영 대응 순서로 제안합니다.
ROBOTICBOX Field References
Process-Driven SI

유압실린더 제조 공정

중대형 볼트 이송

반도체 챔버 반전 지그
반복 이송·검사·적재는 Robot, AI Vision, Gripper로 정리합니다.
작업자 인접 공정은 보조 장치와 Jig(Gripper)를 함께 적용합니다.
반전, 유체 취급, 협소 공간은 Custom Jig와 Rail 구조로 풉니다.
Business Axis
ROBOTICBOX가 제안하는 3가지 이송 자동화 축
작업자 보조형 이송
작업자가 직접 들고 옮기는 중량물 공정을 줄입니다.
Jig / Gripper 솔루션
대상물 조건에 맞는 파지·흡착·클램핑 방식을 설계합니다.
Robot · AI Vision 연계 자동화
검사, 적재, 분류, 안전 관제 공정을 자동화합니다.
Problem Definition
이송 공정은 장비보다 먼저
공정 조건을 정리해야 합니다.
무거운 물체를 옮기는 문제도 현장마다 조건이 다릅니다. 대상물, 동선, 작업자 개입, 특수 조건을 함께 봐야 실제로 돌아갑니다.
어디까지 자동화할지 모름
시작점과 종료점이 불명확하면 병목이 남습니다.
장비만으로 해결되지 않음
파지 방식, 이동 동선, 작업자 개입 조건이 함께 맞아야 합니다.
대상물 조건이 까다로움
재질, 형상, 표면 상태에 따라 Jig 방식이 달라집니다.
공정 특이점이 존재함
반전, 유체 취급, 정밀 안착은 별도 구조 검토가 필요합니다.

Reference
완제품 유압기기 포장 이송
완제품 팔레트에서 포장 기기로 연결되는 구간을 보조이송 구조로 개선합니다.

Reference
방산 탄피철통 이송
안전성과 반복 취급 부담이 중요한 현장에서 일관된 이송 흐름을 만듭니다.

Reference
AI Vision 검사 적재
반복 검사와 적재 공정을 하나의 자동화 흐름으로 연결합니다.
Decision Framework
공정 유형에 따라
이송 구조를 다르게 설계합니다.
모든 제조공정을 같은 장비로 해결하지 않습니다.
반복 공정, 작업자 인접 공정, 특수 공정으로 나누어 접근합니다.
Moon Lifter는 작업자 보조형 이송의 주요 옵션입니다.
Magnetic Lift는 철계 중량물용 Jig 유형 중 하나입니다.
반복 검사·적재·분류 공정
- 반복 검사, 적재, 분류, 조립 공정
- Robot + AI Vision + Gripper 조합
- 생산성과 일관성이 중요한 라인에 적합
작업자 인접 중량물 이송
- 사람이 직접 들기 버거운 중량물 공정
- Moon Lifter + Jig(Gripper) + Rail 조합
- 철계 중량물은 Magnetic Type Jig 우선 검토
- 빠른 설치와 현장 적응성이 강점
반전·유체·협소 공간 대응
- 반전, 반복 투입·취출, 유체 취급 대응
- 정밀 안착, 팔레트 간 이동, 협소 공간 대응
- Custom Jig + Rail / KBK + Safety 조건 검토
유압실린더
반복 투입·취출
유체 취급
볼트·너트 이송
정밀 안착
반도체 반전
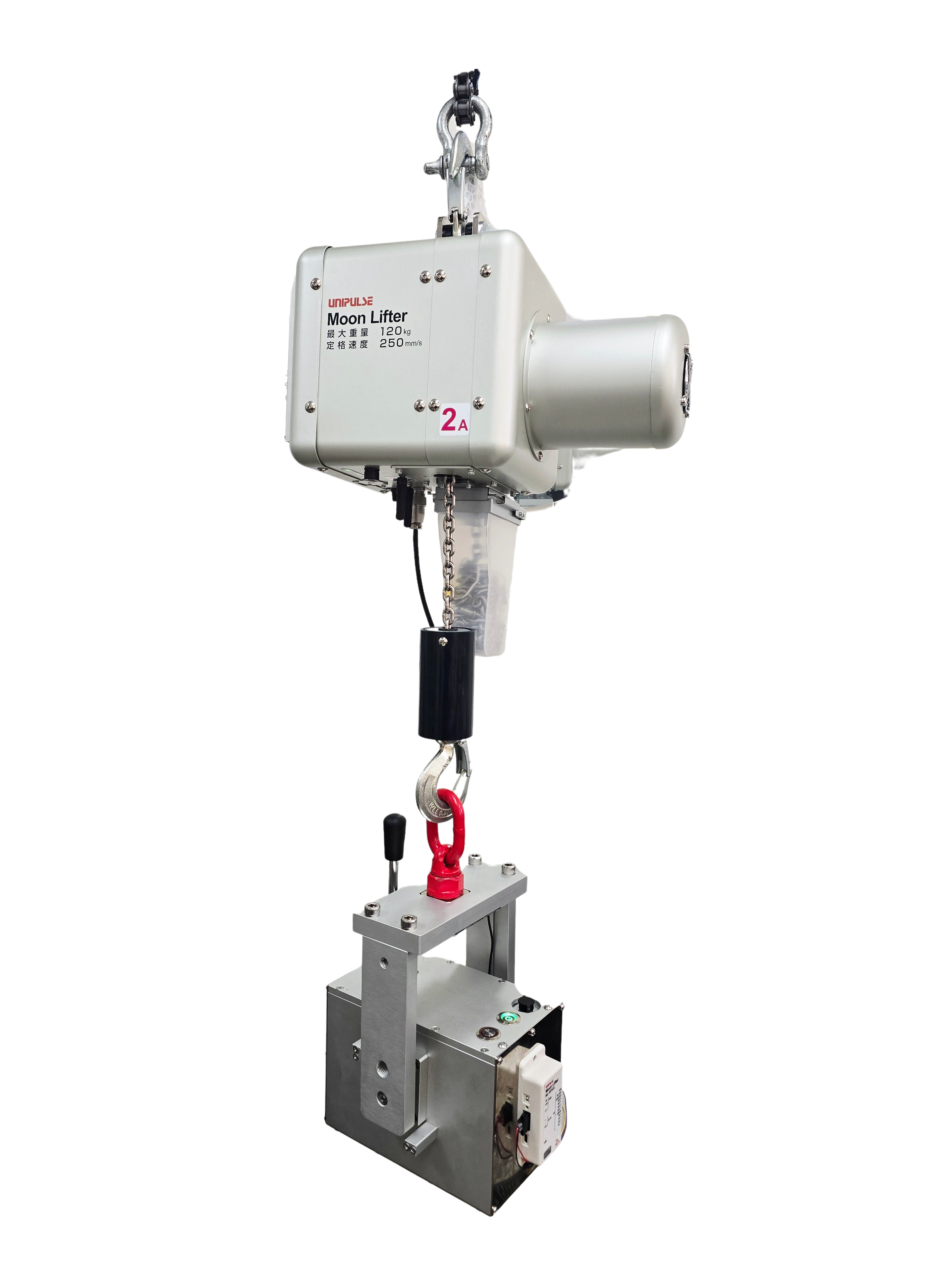
Worker Assist Device
Moon Lifter는 작업자의 힘을 감지해
중량물을 부드럽게 움직이도록 돕습니다.
Moon Lifter는 전동밸런서 방식의 작업자 보조형 이송 장치로,
작업자가 움직이는 방향과 힘을 감지해 중량물의 상승·하강과 위치 조정을 부드럽게 보조합니다.
ROBOTICBOX는 Moon Lifter를 단품으로 보지 않습니다.
Jig, Rail, Safety 조건과 함께 공정 구조로 설계합니다.
Function To Process
장비 기능을 이해하고, Jig와 Rail로 공정 적용성을 완성합니다.
Moon Lifter는 전동밸런서 방식의 작업자 보조형 이송 장치로, 작업자의 힘을 감지해 중량물의 상승·하강과 위치 조정을 부드럽게 보조합니다. Jig(Gripper)와 Rail / KBK가 함께 설계될 때 공정 적용성이 완성됩니다.
Rail / KBK
Moon Lifter
Jig(Gripper)
Safety / Interlock
하중 보조
무거운 워크를 가벼운 힘으로 움직입니다.
작업자 힘 감지
작업자의 조작 의도를 감지해 자연스럽게 반응합니다.
정밀 위치 제어
안착, 삽입, 포장 전후 위치 조정을 돕습니다.
안전 연동 가능
파지 신호, 작업자 구역, 인터락 조건과 연계합니다.
Role In Structure
Moon Lifter가 담당하는 역할
Moon Lifter는 작업자 보조형 이송의 핵심 장치입니다. 단독 장비가 아니라 Jig, Rail, Safety 조건과 함께 적용됩니다.
- Moon Lifter팔 + 하중 제어
- Jig(Gripper)대상물을 잡는 주먹
- Rail / KBK이동 동선
- Safety / Interlock안전 조건
※ 제품 사양은 공식 정보를 참고하고, 실제 적용 구조는 현장 조건 기준으로 검토합니다.
Package Structure
공정 조건에 맞춰
3단계로 제안합니다.
모든 프로젝트를 처음부터 새로 만들지 않습니다.
표준 구조를 기준으로
현장 옵션을 더해 빠르게 검토합니다.
작업자 보조 시작형
짧은 이송 구간이나 단일 작업대에 빠르게 적용합니다.
공정 이송 표준형
작업자 보조 장치 + Jig(Gripper) + Rail / KBK를 묶어
중량물 이송 흐름을 안정화합니다.
구성 개념
Jig = 주먹
Moon Lifter = 팔 + 하중 제어
Rail / KBK = 어깨 + 몸통
※ Moon Lifter는 작업자 보조형 이송 옵션입니다. ※ Magnetic Lift는 철계 중량물용 Jig 유형입니다.공정 맞춤 확장형
Robot, AI Vision, Custom Jig, Safety Monitoring까지 연결하는 확장형 제안입니다.
완전 로봇화 전 단계에서 현실적인 자동화 전환 구조입니다.
Automation Transfer Guide
자동화 이송 구조 가이드
공정 조건에 따라 이송 구조와 Jig(Gripper) 방식을 나누어 검토합니다.
작업자 보조형 이송 구조
사람이 가까이 개입하는 중량물 공정에서 힘 보조와 하중 제어를 함께 검토합니다.
팔레트 간 이송 구조
포장 전후, 적재 위치 변경, 반복 이동 구간의 동선과 파지 방식을 정리합니다.
천장형 Rail · 반전 구조
협소 공간, 반전, 정밀 진입이 필요한 공정은 Rail / KBK와 전용 구조를 함께 설계합니다.
맞춤형 Jig(Gripper)
재질, 형상, 표면 조건에 맞춰 Magnetic, Clamp, Vacuum, Custom 방식을 검토합니다.
Application Fit Check
우리 공정도 적용 가능할까?
아래 조건 중 2개 이상 해당하면
1차 검토 대상입니다.
잘 맞는 공정
- 20kg 이상 반복 취급
- 작업자가 직접 들거나 밀어 이동
- 포장 전후 또는 팔레트 간 이송
- 호이스트·지게차·수작업 병목
- 완전 로봇화 전 단계 개선 필요
- 검사·적재·분류 자동화 가능
공정 특이점 체크
- 180도 반전
- 반복 투입·취출
- 유체 또는 내용물 취급
- 기울기 제한 / 자세 유지
- 표면 손상 민감
- 정밀 안착 / 위치 보정
- 협소 공간
- 작업자와 설비 동시 작업
검토 시 필요한 정보
- 사진 또는 짧은 영상
- 중량 / 재질 / 크기
- 현재 작업 방식
- 이송 거리 / 반복 횟수
- 공정 특이점
조건이 애매해도 사진과 짧은 영상만 있으면 1차 판단이 가능합니다.
Applied Fields & Processes
대표 적용 공정
업종은 달라도 이송 문제는 비슷한 구조를 가집니다. 대상물, 작업자 개입, 이송 거리, 공정 특이점을 기준으로 빠르게 검토합니다.
작업자 보조형 이송
힘 보조, 대상물 파지, 이동 동선을 함께 봐야 하는 공정입니다.
- 유압실린더 제조중량물 이송 병목 개선
- 유압기기 포장 전후팔레트에서 포장 구간 연결
- 볼트·너트 팔레트 이송반복 이송 단순화
- 방산 탄피철통안전성과 취급 부담 검토
검사·적재 자동화
반복성과 정형도가 높은 공정을 자동화합니다.
- AI Vision검사·적재 흐름 연결
- 반복 검사·분류자동화
- 작업자 안전 관제위험 구역 모니터링

특수 공정 대응
반전, 유체 취급, 정밀 안착처럼 별도 구조 검토가 필요한 공정입니다.
- 반도체 챔버반전·진입
- 유체 취급 제품기울기 제한 검토
- 정밀 안착 공정위치 보정과 Jig 검토
- 협소 공간천장형 Rail 구조
상세 페이지에서 사진과 조건을 더 확인할 수 있습니다.
Why ROBOTICBOX
장비가 아니라, 실제로 돌아가는 이송 구조를 설계합니다.
ROBOTICBOX는 장비를 따로따로 제안하지 않습니다. 대상물, 이동 동선, 작업자 개입, 안전 조건을 함께 보고 적용 가능한 구조를 설계합니다.
공정 기준 판단
무엇을 팔지보다 어느 구간을 개선할지 먼저 봅니다.
Jig(Gripper) 중심의 대상물 대응
대상물 조건에 맞는 Gripper 방식을 검토합니다.
표준 구조 + 현장 옵션
검증된 구조에 필요한 옵션만 더합니다.
설치 이후 운영까지 고려
안전, 유지보수, 후속 확장까지 함께 봅니다.
Process Diagnosis
사진이나 짧은 영상만 보내주셔도
적용 가능성을 먼저 검토합니다.
대상물 중량, 재질, 현재 작업 방식, 공정 특이점을 알려주시면 적합한 이송 구조를 1차로 정리해드립니다.
상담 전 준비 정보
- 사진 또는 영상
- 중량 / 재질 / 크기
- 현재 작업 방식
- 이송 거리
- 공정 특이점
검토 가능한 범위
작업자 보조형, 공정 이송 표준형, Robot · AI Vision 연계까지 함께 검토합니다.